International Journal of Civil Infrastructure (IJCI)
ISSN: 2563-8084

Volume 5 - Year 2022- Pages 19-30
DOI: 10.11159/ijci.2022.004
Seismic Surface Waves and Borehole Methods to Determine Shear Wave Velocity: A Review of Measurement Practice by Contractors in the UK
Katerina Kyrkou1, Matthew Frost1, Paul Fleming1, Nick Sartain2
1Loughborough University, School of Architecture, Building & Civil Engineering
Loughborough, Leicestershire, UK LE11 3TU
a.a.kyrkou@lboro.ac.uk; m.w.frost@lboro.ac.uk; p.r.fleming@lboro.ac.uk
2High-Speed Two (HS2) Limited, Department of Geotechnics
Two Snow Hill, Birmingham, UK B4 6GA
nick.sartain@hs2.org.uk
Abstract - In high-speed railways if the soil surface wave velocity approaches the train speed this can cause dynamic issues with the track. For the new high-speed railway (HS2) in the UK, Rayleigh and shear wave velocities (Vs) are determined as part of construction compliance testing using seismic surface waves methods (typically Multichannel Analysis of Surface Waves (MASW) and Continuous Surface Waves (CSW)). However, as these methods are not standardised, there is the potential for differences in how contractors design, collect and process test data which could lead to differences in assessment for any given site. As part of a wider project investigating such tests, a qualitative interview study was undertaken of contractors testing HS2 earthworks to understand how they design and undertake such investigations. The interviews focus on data capture, data processing and interpretation of seismic surface waves methods, but are also compared to the methods used of measuring Vs in boreholes. This show there is variation in testing and analysis protocols for similar sites and experience is important in undertaking such work. Contractors use experience from other projects and review their processes on site to check the data is suitable. They use both commercial and in-house software for data analysis and the final velocity profiles produced strongly depend on the assumptions made around soil conditions. While there are many similarities in approach used, the differences lead to variability in results. The paper concludes by proposing elements of the testing that could (with further work) be included in best practice guidance around data collection and processing.
Keywords: Seismic surface waves, MASW, CSW, borehole methods.
© Copyright 2022 Authors - This is an Open Access article published under the Creative Commons Attribution License terms. Unrestricted use, distribution, and reproduction in any medium are permitted, provided the original work is properly cited.
Date Received: 2022-03-25
Date Accepted: 2022-04-15
Date Published: 2022-05-03
1. Introduction
In High-Speed Railway construction managing earthwork’s stiffness and surface wave velocity response relative to train speed is important. Studies have shown that Rayleigh wave velocity (VR) is a major parameter for the railway’s track stability, as if it reaches the train’s speed, dynamic resonant deflections may occur [1,2]. For this reason, VR is now examined in the pre-construction phase of high-speed railways and critical values or minimum soil target velocity values (and/or stiffnesses) to a specific depth range are included in the construction specification. These parameters must be shown as being achieved during construction of the system. Such an approach is being used in earthwork’s construction for HS2, the new high-speed railway line in the UK.
However, the measurement of wave speed is challenging, as several methods by which the ground’s seismic surface wave speed can be assessed exist, and these are not standardized. Various researchers have shown that there is a difference in how seismic data are analyzed and interpreted, based on the survey design and the experience of the staff processing the data or the basic method which the data was collected [3]. Therefore, where target seismic velocities are included in railway earthwork specifications, there is a need to understand how different approaches of collecting and analyzing seismic data may influence the derived absolute wave values.
The purpose of this study was therefore to understand the ways seismic surface wave data are acquired, analysed, and interpreted in the UK by geophysics contractors. This was performed through a semi-structured interview process to feed into wider work linked to a subsequent comparative field trial to help inform routine testing for railway earthworks compliance. The study aims to understand specifically how contractors potentially working on HS2 apply and evaluate some of the most well-known non-invasive seismic surface waves methods for assessing Rayleigh (VR) and shear wave velocity (Vs) in such earthwork projects. Understanding the way data is collected and processed helps understand the important factors when applying these methods in the field. This can support the better design of such surveys, which may include scope for standardization of the processes. The paper initially presents a short introduction of the appropriate methods. It then presents the interview methodology, summarizes the results and concludes on the approaches used, the differences found and the advantages and disadvantages of each approach, and the implications for methodological standardization or best practice. Although this is focused on seismic surface waves methods, some questions on invasive methods (via boreholes) to obtain Vs were also asked and are included for comparison purposes.
1. 1. Introduction to Geophysical Methods of Surface and Shear Wave’s Determination
The geophysical methods to measure ground’s geotechnical properties for earthworks compliance generally assess seismic surface waves. In most cases surface measurements are made as part of site investigation coupled with borehole data and sometimes replace the use of classic, invasive seismic methods, such as cross-hole and downhole geophysics. The main benefits of surface methods are that they are quicker to implement, less expensive and more environmentally friendly. Seismic surface waves methods generally use a string of geophones mounted on the ground and a source to generate energy and are usually directly measuring Rayleigh wave velocity (VR). Raw data are processed to give VR for different frequencies of input, and through inversion an estimate of Vs with depth can be achieved [4]. For earthwork compliance these values can then be compared to a specification target.
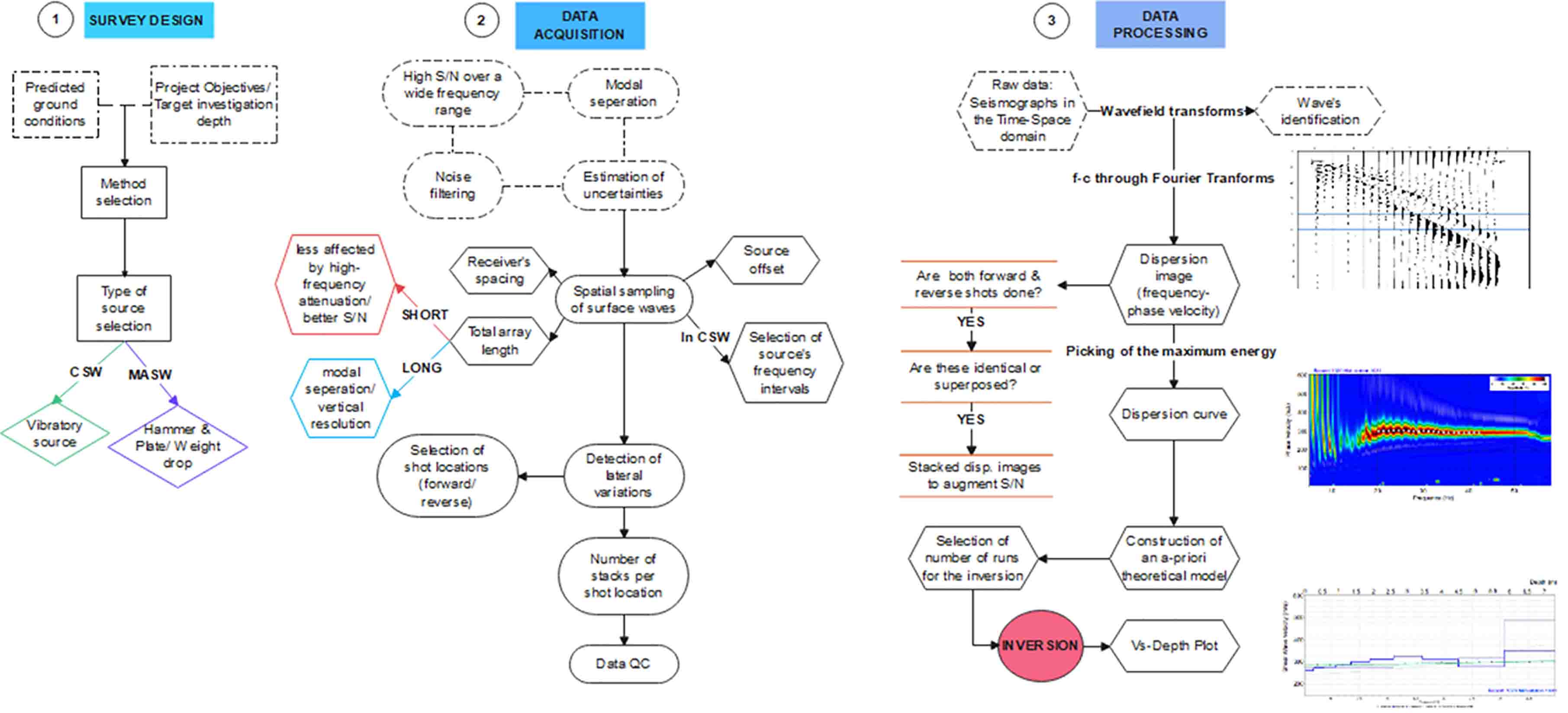
The methods are divided into active and passive. For active ones energy is generated by a seismic source (often a sledgehammer on a plate, a weight-drop, or a vibrating source) and for passive the soil’s seismic response is captured from ambient noise [5]. The active methods most used are Multichannel Analysis of Surface Waves (MASW), a survey done in the field in the same way as seismic reflection/refraction using an impulsive source, and Continuous Surface Waves (CSW) where energy is generated through a vibratory source. The passive method used is Refraction Microtremor (ReMi), most usually done with the same receivers as MASW at the end of the survey. Only MASW and CSW are considered further herein. As multi-phase processes there are lots of areas where approaches to survey design, data collection and analysis may vary. A summary of the steps, factors and parameters taken into consideration for survey design, identifying where differences and similarities in data collection and assessment may occur are summarized in Figure 1 (please note space precludes further detailed explanation of the methods here but the reader is directed to [3]).
While published work on the application of geophysics to railway earthworks compliance is limited, several relevant studies have compared results and analysis of various surface wave methods to borehole geophysics. MASW and ReMi were compared with SCPT and cross-hole seismic in terms of accuracy, functionality and cost at test sites in Missouri, showing that MASW is the most accurate in deriving Vs after cross-hole and the most functional regarding data acquisition and analysis, as different processors were picking the same dispersion curve [6].
A study showed that Vs difference from MASW and direct borehole measurements on unconsolidated river sediments was 8% to 15% [8]. MASW was also applied with a land streamer, showing good agreement with CPT [9]. The same method, together with passive surface waves analysis, was compared to in-hole tests in the InterPACIFIC Project to estimate Vs at three test areas consisting of different materials. The results were analyzed by expert teams, to compare between the assessed Vs profiles, showing a relatively good match of the derived Vs, with a variability of invasive and surface methods up to 0.20 COV (i.e., Coefficient of Variation) for most depths. The study also indicated that for seismic surface waves methods, the COV was augmented with depth, as these methods cannot easily provide the bedrock’s velocity [10].
Seismic surface waves methods have also been used in various case studies in a railway environment. They were applied in a high-speed railway in France, and the Vs to depth results were confirmed by Bender Element technique [11]. MASW was also applied in a railway embankment in Ireland where it successfully mapped the steeply sloping bedrock [12]. More specifically for UK railways, combined MASW and CSW methods were assessed to map stiffness variations in earthworks constructed of complex and laterally varying materials [13].
However, little has been published comparing geophysical methods for earthworks compliance as part of major infrastructure projects. The relevant work also shows that the data presented after a survey can vary according to the nature of the investigation, the expected conditions and data processing and ultimately the use of the findings. It is clear there is little standardization of approach as the surveys typically form part of specialist local investigations, and contractors do not follow specific common rules when acquiring, processing and interpreting seismic data, but apply methods more based on experience. If seismic data are to be used as part of routine earthwork compliance testing, then a wider understanding of the data collection process and its interpretation is needed, and a level of standardization if possible.
2. Methodology and Study design
The purpose of this study was therefore to establish how contractors in the UK approach seismic surface waves survey design for earthworks compliance via semi-structured interviews and by anonymously comparing their answers.
The interview process included open-ended questions divided into themes and participants were free to elaborate as much as possible, to provide enough information about their experience with the methods. The questions were designed from an understanding of the test process (Figure 1) and their application in railway earthworks, informed from the limited literature available. The survey was shaped following standard survey methodology to minimize biases and leading questions from the interviewer [14].
The question themes were:
- seismic survey design;
- field equipment and data acquisition approaches;
- data processing and interpretation;
- benefits and limitations of seismic surface wave methods;
- time needed for data acquisition, the number of field staff and the training they undertake;
- possible correlations between the different methods (not covered further herein).
To reduce interviewer bias, questions were asked following the same order where possible. Four out of five main contractors currently working in the UK agreed to participate. Data were collected via transcript and then summarized under themes and elements [14]. The elements were common for all test methods (i.e., test design, data acquisition, processing and interpretation).
3. Results and Discussion
Participants were interviewed about both invasive and non-invasive methods to derive shear wave velocity, but this paper concentrates more on MASW and CSW. These two have typically been used to-date on earthwork compliance and are hence considered the main approaches. Space precludes reporting of other methods and invasive methods are briefly presented in the end, for comparison.
Results are presented in themes. The general benefits and limitations of the methods identified were based on common grouped and tabulated responses. Based on the interviews, the most significant advantages of MASW is that this is robust to local heterogeneities, it can be used together with refraction, it allows for a clear identification of fundamental modes (M0), it identifies soft ground and overall it is cost-effective. CSW, by comparison, gives greater resolution at shallow depth, it’s resilient to background noise and needs less space to perform. The main disadvantages include the Vs uncertainty, the ambiguity in dispersion picking and the limited depth range. Regarding acquisition time, for a profile of 24 geophones at 1m spacing and for 5 shots in total (i.e., forward, reverse and three in between), data acquisition lasts less than 1h and the total time is no more than 2.5h. CSW is similar and for both methods 2-3 people are needed on site.
3. 1. General questions
When selecting the most appropriate technique, there was agreement that this depends on the objective, the nature of the survey and the target of interest. One contractor highlighted that the target’s depth, size, characteristics and “detectability” (i.e., easiness to identify) matter, as well as the assumed underlying geology (i.e., physical properties and likely contrasts), the site conditions (i.e., external noise that may affect the data, which is important in construction sites), logistical limitations for deploying the equipment and the client’s budget, all impact the survey design. One firm also talked about the client’s time frame, while another mentioned parameters like the ground’s weathering and fracturing, stiffness and/or water table level. One said, they base their initial design decisions on experience of similar sites with similar objectives and they also use rules of thumb for the parameters (survey length and maximum depth) Often they would not use one single method but would instead try multiple methods to give them “the best chance of answering the client’s questions”. This implies that experience of the survey designers and analyzers is vital.
3. 2. Equipment details and data acquisition approaches (MASW and CSW)
The second set of questions aimed to explore their equipment, and the steps followed in the field for data acquisition. For MASW, contractors mostly use a hammer (6kg standard weight), and a plate as the seismic test source. One said hammer choice depends on the desired investigation depth (heavier for deeper) and all mentioned the use of an accelerator weight drop system for depths more than 50m. Based on the literature, the most common 6kg hammer has limited energy in low frequencies, turning it good for surveys which map the subsurface to 10-20m depth, typical depth of railway earthworks [5]. Most use a synthetic impact plate (i.e., polyethylene) to generate low frequencies and one talked of metal plates, being good for generating higher frequencies. They explained that they tend to initially experiment in the field with combinations of hammer and plate to give the desired frequency range and signal quality. All use a standard commercial seismograph and controller acquisition software, but the capabilities of the recording equipment does vary. While there are many consistencies in approach, the dissimilarities lead to possible differences in collected data for any given site, particularly at the margins of the survey design (high or low frequency extent of data).
For receivers, for standard MASW, all normally use 4.5Hz resonant frequency vertical spiked geophones but choose geophone’s type, number (typically 24-48) and array length, based on the project (some may use 12Hz geophones as an alternative). One stated that if they required a geophone spacing of 2m and a spread length of 48 or 96 geophones, they would probably use all the geophones they have available and double the data density rather than just use 12 or 24 geophones, because “it’s better to have oversampling than risk of under sampling”. Another said that the receiver’s number might be impacted by the logistics of the available space on site. Also, the spacing could be adapted due to understanding the velocity of the near surface, so they might need to use a tighter spacing. As they stated, “you really must understand why you are asked to do the survey. There is no one rule for every site, but you can have a general starting point”. They added that most typically the receiver interval would be between 1m and 2m spacing. A third contractor stated, “it’s the spread length that dictates the achieved survey depth and the receiver’s spacing that is important to resolve soil stiffness”. All participants identified preliminary tests to see what frequency ranges they capture. More specifically, they try different spacings and impact offsets locations prior to concluding on which combination is the best for a specific site or project’s aims.
Two firms also possess a land streamer (i.e., geophone’s array, towed along the ground). They reported that these can be used to cover a large area or a long linear distance (up to 1500m per day in an accessible flat site, if using 10m shooting intervals) to profile the ground, but at the expense of precision in the measurement and the determination of representative stiffness values.
One owns several 24 or 48-channel land streamers, set for either 1m or 2m intervals, but can adjust them if needed. Both firms have found it difficult and time consuming to move the streamer on rough ground. Thus, the rapidness of the streamer versus the classic MASW can be advantageous, depending on the geophone interval, the number of shots, the evenness of the terrain and the productivity. This may offer advantages in rail earthworks compliance testing and needs further evaluation. It is clear therefore that there is some variability in the initial setup for data collection in terms of number and spacing of geophones and relative shot positions. Most adjust the survey based on initial tests and this would appear best practice.
For data acquisition parameters, all underlined that these depend on site-to-site assessment and that their field teams would assess the data and make sure that the ground wave signal is not reaching beyond the end of the recorded trace. It would therefore seem imperative to check that the full signal is collected in any data collection setup. One firm mostly uses 0.25msec sampling rate stating, “that’s usually sufficient to image first breaks from P-waves” (depending on the velocities they pick on site), adding “obviously, the faster the general materials, the greater the sample rate needed”. However, they would usually aim to sample the dataset with enough sampling points to process for refraction if needed, even if this is not the survey’s objective. The recording time length varies and would also be chosen in the field, but this must be long enough to encompass the entire surface wave train. Another reported for a standard test, they mostly use a sample interval of 0.125msec and a record length of 1 sec, but if they know the material is very slow, they might extend the record length to 2sec, to guarantee they capture all the wave energy. Two firms stated that typically their sampling interval would be 0.5msec and the record length would be 2sec.
For ensuring good quality data, they focused on the acquisition protocol and the field techniques to augment the signal to noise ratio (S/N). Two contractors said that they often shoot from both ends of the geophone spread, and depending on the objectives, they might get some mid-spread shots too. Another mentioned the shot interval through the spread will be double the geophone spacing, and at the processing stage they may also stack (overlay) the shot data if needed. Another said that they do forward and reverse shots, by undertaking a symmetric line (i.e., same shots at equal distances at both ends of the line, so data is collected on waves travelling in each direction). A further contractor shoots at both ends, if there is space available, but only shoots along the line where necessary to produce 2D profiles. It is therefore apparent that all contractors have different systems and approaches to collect good wave speed data and that this if often adapted on site to ensure the data quality is suitable.
For getting good signal to noise ratio (S/N), one contractor undertakes noise test to start with, to determine the baseline for background noise, so any noisy geophones can be adjusted. Then, during acquisition, they check the shot records in real time, and if there is visible noise in the time domain, that can be eliminated during processing. One firm might also dig small holes or scrapes to protect geophones from wind noise. However, all said their site control includes basic checks, like a shot timing to ensure that trigger time zero recognition is consistent and stacking shots (overlaying data from the same collection point) together to improve S/N for processing. In the raw data records, they look at the interaction between body waves and surface wave’s energy and may “adjust the shot offset to separate body from Rayleigh waves”. Based on the literature, close to the source (i.e., distance less than a wavelength) direct waves are identified instead of plane Rayleigh waves, resulting in apparent lower phase velocities, called “near-field effects” and therefore too small offsets should be avoided, what needs to be considered in survey design [5]. Finally, some firms look to generate field dispersion curves to assess the phase velocity- frequency relationship on site. One firm would experiment with different offsets and their field staff would decide on stacking shots during data acquisition. Regarding the offset, they discussed a 10km route survey with a streamer and reported that the ideal process for obtaining the most useful dispersion curve and extracting fundamental mode (M0) will never be the same for each shot along that 10km section. If they design a survey with 24 geophones, but they deploy a longer spread of 48, they only need one shot, but they can process it for different offsets from that same shot. Therefore, by default, to have many more options, if they use 48 receivers, they can then choose 24 traces (i.e., from No 1-24, 2-25, 3-26 etc.) at the processing stage.
For the CSW method, all use similar systems with shaker sources, controlled through an instrumented system. They can be run through a 5-500Hz pre-set range of frequencies. They also usually have a linear array of typically 6 stick geophones which can be spaced at 0.5-1m (i.e., total test length 3-6m), depending on the general stiffness of the ground. It provides the Rayleigh wave velocity and through assumptions of soil’s density and Poisson’s ratio, it can calculate Vs, the shear modulus, the Youngs modulus and other parameters too. Another firm uses a system with potential frequencies 5-700 Hz, but generally, they cap the top frequency used at 400Hz for rail compliance work, stating that “at data above 200Hz the wavelengths are becoming smaller than geophone intervals, so we’re reaching a sampling problem”. One firm said they are not limited to 6 geophones and often when they do CSW, they also do MASW at the same time, so they tend to use the same recording equipment. This means that they might have more than 6 geophones set out to record more data than they necessarily need for CSW. Then, they will just select the number of geophones they want to use for the processing step.
Regarding the chosen frequencies, they collect data at customized frequency intervals, so they have a configuration file that steps up typically between 5Hz and 500Hz. This samples the lower, mid-range and higher frequency ends at different intervals. On a stiff soil, they would use a different frequency range and they would focus more time and steps at one end or other of the ranges. On softer soil the system can be set up to sample at 100Hz max frequency but undertake more surveys between 50Hz and 100Hz. Also, they can change the geophone interval to focus on the stiffer or softer layers. Another said the interval can be as small as 0.1Hz, obviously depending on the target depth and the amount of required data. At lower frequencies they would generally choose between 2Hz and 5Hz increments and then step them up as they get to higher frequencies, to 25Hz or 50Hz increments, depending on the survey design. The total recording time for CSW depends on the level of detail and the number of frequency intervals chosen. Typically, 20-30 mins is required, but if more detail of the subsurface is needed, with a higher number of frequency intervals required, it could be more than 1h per test. Good data quality is ensured by just putting the source at one shot location and checking the coherence of phase velocity difference between the geophones. One firm said they typically do not do reverse shots for CSW and they can identify the existence of any other source whose frequency coincides to the vibrator’s, by the graphs per geophone they see on screen.
3. 3. Data processing and interpretation (MASW and CSW)
The next questions focused on data processing and interpretation approaches in the office.
For processing of MASW data, participants use either (or both) commercial and in-house software (typically MATLAB-based codes written for specific applications). However, they would probably not mix and match the two types of software, but they would rather choose which to use based on the objectives (i.e., commercial is preferred for straightforward investigations and their in-house for bespoke deliverables requiring more freedom in data adjusting). However, one contractor uses both in-house and commercial packages for different processing steps and, explained, “with the in-house package, we pick the dispersion step manually and then we use the commercial for the inversion”.
For the dispersion curve, one stated, it is better to be picked manually, as they can make a critical judgement of the picked mode, rather than relying on automatic processes and their potential overlapping errors. This is because the recognition of the fundamental mode from secondary and tertiary modes is very important for not ending up with a completely incorrect Vs model. This is also supported in the literature, as joint inversion of the fundamental and higher modes gives more reliable outcomes. However, the strategy for accounting for higher modes is not yet standardized and are not put into practice in most commercial packages [5]. It should be noted that all inspect the dispersion curves to see they fit, but it seems this may vary from site to site.
One firm uses CMP (Common Mid-Point) method, so they always look at the dispersion image from the center of the spread first. Another stacks their data in the frequency domain and sometimes windowing (a process to focus with a “frequency grouping”) may be applied if it improves the result in terms of higher modes appearance. These are picked and included in the inversion because “it’s just extra information that will help deliver the best ground model”. A further contractor applies minimal and cautious windowing and muting techniques to improve the low frequency part of the dispersion image. However, it should be noted that caution is needed here in any smoothing as these may change the apparent velocity. They also interpret each dispersion image individually and do not stack them, as it can be misleading if they get one or two shots that are showing up a higher order mode which can pollute the image. As input parameters for the construction of the starting model, all used P-wave velocity (Vp), Vs, Poisson’s ratio, number of layers and soil density, derived from nearby borehole logs if available or other desk study sources if not to give a starting point for iteration.
Within the construction of the final Vs model, an initial ground model for the site is required and fitted to the site data, and most firms generally follow a broadly similar process. One contractor primarily inputs the measured Rayleigh wave curve, derived directly from the experimental data, and then inputs the chosen ground model used to run the inversion. Within their software, they can also add water table depth, whereas others may not. Another explained that sometimes, if no borehole logs are available for the input parameters to the ground model, they just make their best estimate based on the expected geology. They would also use, if required, data from geological maps, these being a good guide but lacking detail for very shallow MASW work. Nevertheless, if a ground investigation has already been done, providing specific density values, then all firms use them in their analysis (significant for earthworks and made ground). Generally, their approach is to always use as much a priori geotechnical information as possible when building their initial model, and then it goes through an iterative process of varying these parameters to provide the best fit to the data, that is “geologically plausible”. One firm added that “if we are trying to determine the number of ground layers to use, this must be primarily done through boreholes”. Yet, they also do parameterization testing within their modelling, by mainly “holding a fixed number of iterations within a model and then create models with for example 2-10 layers, then compare the RMS misfit as a function of the number of layers and look at where the difference changes”. This is regarded as important to look at, even with available borehole data, “because a visual change, defined in a borehole log, doesn’t necessarily correspond to a density or a measurable change in Vs”. One contractor also re-informs the initial model to adjust it and re-run the inversion if they are unsatisfied with the first iteration results. They would also test the number of layers by starting with typically a 10-layer model and if they find that their dispersion curves do not have many points on them (i.e., they have not resolved a wide range of frequencies and the model is unstable), then they might reduce the number of layers.
As for the number of runs and the threshold of fit imposed, one contractor said that the software defaults to 5 iterations, which are sufficient to derive a suitable model for most purposes. However, they believe that to derive arguably the best fit model, doing some testing is also sensible. This means that they would run some models with an iteration range “but would always aim for the simplest best fit model to the data, by checking whether subsequent iterations are no longer drastically reducing the RMS misfit”. Another agreed that the iteration’s number is variable for each shot, but generally they aim at RMS errors less than 5-10%. Another uses all 30 iterations that the software goes up to, as there is no option to put in a convergent limit. Another uses 10 iterations, as a default maximum. Most (if they can) stop the iteration when they see that the model is not improving its convergence. Therefore, while a similar process is used, there is a clear difference in the choices taken to assess the final Vs information based on the nature of the ground models used. This can be due to the number of layers put into the model, the number of steps in the processing to gain convergence or best fit to the initial model and the availability or assumptions made about initial soil properties (and which properties to include).
For CSW data processing, according to one firm, the output is similar to MASW, as they both work on the same principles. They use an in-house code, and the model input parameters are similar to MASW, based ideally on borehole data. Another firm checks each receiver signal and cleans any background noise within the software. They then plot either shear modulus or Vs and VR against depth in spreadsheet. They commence by looking at the stiffness against depth plots and the coherence values of each geophone at each frequency. Shear modulus and wave velocities are calculated within their software, from the time domain data, through a fast Fourier transform.
So again, data processing varies and relies heavily on staff experience, the way data has been collected, the software and any smoothing needed. This again could lead to areas of variability in the final results and shows that during data collection consideration must be given to subsequent processing.
3. 4. Experience with invasive methods (Cross-hole, Downhole, PS Logging, S-CPT)
For cross-hole invasive methods, all firms tend to follow the ASTM standards for data acquisition at 1m depth intervals but can vary from 0.5 to 2m. For instance, one mentioned once they tried 1m depth increments down to a specific lithology and then spacing was decreased, until reaching a hard rock where it was increased again, based on the client’s specification. Another drills 3 grouted boreholes, with 3m separation. The sensors used (7 in total; 1 vertical and 6 arranged radially in the horizontal plane at 30 degrees angle offsets) are made by BGK. Energy is generated through a source that is fired and in both methods they use a Geometrics Geode. The source is IPG5000 (or 3000) that creates shear and compressional waves, used in water filled or dry boreholes. To ensure they get repeatable measurements, they measure the profile down to the bottom of the borehole and sometimes then back up again. Regarding source location, this would only be put to the two side boreholes and a forward and a reverse profile for both would be obtained. Regarding borehole separation in cross-hole, a third said that even though ASTM recommends 3-5m spacing, this is ideal in low-velocity soils, compared to hard rock materials where 3m separation could cause big problems with recognizing P and S waves. The distance should neither be too small, where P and S waves energy would not separate, nor too big where signal will be lost and stated that, “in really hard rock, borehole separation might be 10m, sometimes even 20m- you’ve got to design it based on the geology”. They usually generate energy though two types of impulse sources for Vs to measure ground; one generates vertically the other horizontally polarized shear wave energy. In some studies, measuring both is beneficial because there might be a different stiffness regime depending on the orientation. The benefit of having 3 boreholes is also that trigger errors are more easily removed, and attenuation (damping ratios) can be assessed through comparison of the two receiver’s response from a single shot. On some occasions, they have used more boreholes, such as in nuclear projects where the budget was high. In this case, they tried an L-shape layout, where 3 boreholes were drilled horizontally and another 3 vertically, to map really critical structures and check for any velocity anisotropy based on azimuth. One participant puts one receiver per hole but if doing P-wave tomography, they can use a hydrophone string of 24 receivers. The source used is a P-wave sparker, Shh sparker and Shv mechanical hammer; in the last two cases a reversible source is required, but another one said they shoot just horizontally, so they put one receiver in each receiver’s borehole. They generate energy though a high energy electromotive force that forces part of the source against the borehole. That can generate either P or S waves. In case they want to vertically polarize S-waves, then they also use a shear wave hammer.
In terms of the downhole method, one said that unless asked otherwise, they prefer to follow ASTM guidelines. However, generally these projects come to them as part of a specification that’s already been requested, and they supply the specified survey. The source looks like a shear beam (like a railway sleeper) pushed into the ground, with hammers on each side. They strike each side separately and the two shots are then combined and mathematically polarized at exactly 180 degrees in Geometrics SeisImager software. This allows the S-wave to be picked more confidently in PickWin. Another uses the same source, and the receiver interval is 4-5m, so that the change in time between arrival at the upper and lower receiver is large enough to eliminate picking errors in absolute travel time and measurements are taken every 1m. The receivers are minimum triaxial geophones housed in a casing, suitable for lowering into a borehole. Another’s equipment includes Geode seismograph, Geometrics Seismodule controller software and the same BGK multicomponent clamping geophones used in cross-hole, at 2m spacing. They also use a Dual Downhole System (DDS) where possible (i.e., 2 multi-component receivers at a set interval). Their source is a shear plank on the surface that is weighted by a 4x4 vehicle and then they shoot at both sides with 14lb hammers to produce a reversible shear wave.
For cross-hole data processing, three firms use SeisImager to load the seismograms and pick the first breaks and then in a spreadsheet they calculate velocities. However, distinguishing S from P-waves can be difficult. S-wave arrivals can be more easily recognized by taking 2 shots in the field; if using a vertically polarized source, they take a shot with the first particle motion upwards and then they repeat by moving the passing motion downwards, to get a perfect mirror image with a peak and a trough at the same time in the shot record. They then simply compute velocity in a spreadsheet, by knowing the distance from the source to the receiver. As boreholes are not perfectly vertical, they also do a borehole deviation survey too, using a wireline tool with inclinometer to measure the XYZ position of the hole. Instead of SeisImager, one uses its own in-house code to visualize and interpret the arrival times.
In the downhole method contractors load the right and left shot data gathered and they process the data to polarize the shots. They use the same packages as for cross-hole.
Regarding P-S Suspension Logging, the main constraints of the method are that this is done in open hole, so measuring in the top 10-15m where generally softer materials exist and the holes won’t stay open or above the water table is difficult, and that it works only in water filled holes. In terms of the test’s rapidness, the shots are every 1m and it takes approximately 5 mins per shot. The benefit is that it gives P and S-wave data with the same fidelity and accuracy as cross-hole, but from a single hole operation. It is used a lot particularly for wind farms and in “over-water” investigations near shore and marine investigations”.
For seismic Cone Penetration Test (S-CPT), typically 2 triaxial receivers are used, mounded just behind the cone’s tip and they are often either 0.5 or 1m separation. The source is as in downhole tests and a test is taken typically every 1m. The principle is the same as with downhole and depending on the requested data presentation format, contractors either use in-house software for the full workflow, or they pick the data and then produce a profile in a spreadsheet. The time needed for reaching 20m depth with 2 people on site measuring every 1m is about 1.5 hours and the main benefit is that both the source and the receivers have excellent coupling to the surrounding formation, compared to borehole methods where there is plastic liner, and the annulus is generally disturbed. However, it can go only as deep as one can push the cone, so maximum depth depends on the soil type.
3. 5. Correlations between Geotechnical & Geophysical Tests
Having attempted to correlate the results between any of the methods discussed, (either between the geophysical tests or with other geotechnical tests), one contractor said they have tried multiple methods: Cross-hole, Downhole, MASW and S-CPT, all at the same site down to a depth of 40-50m. They stated, “generally, the methods are comparable but never exactly match-there are always some pitfalls or errors which are slightly different”. There seems to be a consensus that cross-hole is the benchmark and that the other methods should be measured against, since it is purely a direct measurement of Vs, whereas lots of others rely on some form of inversion and data processing. In their tests, they found small differences 10-15%. Regarding surface wave methods, they believe “they will give a good estimate, with a “bracket” of velocities that you might expect with depth, but then when compared to Cross-hole and S-CPT, the later have the fidelity to pick up small variations, whereas surface wave methods give more of a broad estimate”. Another firm also involved in projects where invasive methods and MASW were tested found variable Vs values, with a whole suite of tests undertaken in the same holes. They think it is challenging to try and rationalize “what is the correct portion of the numbers”. They often see the Cross-hole and the P-S Logging showing potentially greater similarity than with Downhole, which probably is attributed to the seismic sources being in the hole compared to placing the source on the surface. Among surface wave methods, they have combined MASW and ReMi data to get shallow and deeper information respectively and get one large dispersion curve and a Vs profile with depth. However, the accuracy and usefulness of the combined data was often found to be site-specific. Another said they have also compared Cross-hole and Downhole to surface wave methods on a test site with boreholes at 40m depth and found a good correlation for the top 10-20m, but below that surface waves lost resolution, but the broad velocity was similar to the bottom of the boreholes.
4. Conclusions
This study revealed that contractors applying seismic surface waves methods for railway earthwork compliance follow the survey specifications (based on understanding the survey’s purpose), in conjunction with their experience of similar testing in similar soils. While some survey methods may be quicker to implement, the quality of the results depends on the staff’s experience obtaining good site data and adapting the survey as they proceed, but also consider subsequent analysis during collection.
The design element and expert’s input from the beginning until the end of each survey is vital with the test protocol depending on two parameters, the site materials and the purpose of the test. Data quality control on site is important, as specific techniques can reduce data noise and help analysis and interpretation in the office. Each firm has broadly similar but slightly different approaches to data collection and processing. However, it appears there is no individual process to follow for seismic surface wave methods, as one specific method would not always be useful and relevant to every site, in contrast to borehole methods.
The interviews showed there are differences in array lengths used, shot locations, extent of data collected and data processing. There were differences in the inversions assessed and the models then used based on available soil information and survey quality. This leads to firms using different numbers of layers in models and different number of calculation iterations to get best fit. All these factors may influence the final output data.
While there can perhaps be no standard overall process, there is scope to inform best practice guidance or standardise elements of testing for surveys used for railway earthworks compliance (where the survey is linear over an extended length but limited in depth, and the evaluation is specified against pass and fail criteria for the works). Such standardisation could centre around defining best practice for the survey sample rate, the sample time, the length of geophone string to be used, the shot locations/offsets, the geophone spacing and the target wave frequencies to be assessed. There may also be scope to inform best practice guidance for the analysis, in terms of steps of data quality assessment for smoothing or ground model inputs. This would then give more comfort that different contractors have handled data in a similar way or followed best industry practice. Additionally, standardisation for best practice would allow for optimisation of surveys in terms of time or resources required on site.
As a next step in the research, the interviews have been used to design an experimental study including MASW and CSW on a trial embankment including testing by several firms, to check the method’s reliability and repeatability and inform the development of best practice.
References
[1] Gao, Y., Huang, H., Ho, C. L., & Hyslip, J. P. (2017). High speed railway track dynamic behaviour near critical speed. Soil Dynamics and Earthquake Engineering, 101. View Article
[2] Krylov, V. V., Dawson, A. R., Heelis, M. E., & Collop, A. C. (2000). Rail movement and ground waves caused by highspeed trains approaching track-soil critical velocities. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 214(2). View Article
[3] Foti, S., Hollender, F., Garofalo, F., Albarello, D., Asten, M., Bard, P. Y., Comina, C., Cornou, C., Cox, B., di Giulio, G., Forbriger, T., Hayashi, K., Lunedei, E., Martin, A., Mercerat, D., Ohrnberger, M., Poggi, V., Renalier, F., Sicilia, D., & Socco, V. (2018). Guidelines for the good practice of surface wave analysis: a product of the InterPACIFIC project. Bulletin of Earthquake Engineering, 16(6), 2367–2420. View Article
[4] Park, C. B., Miller, R. D., Xia, J., & Ivanov, J. (2007). Multichannel analysis of surface waves (MASW) - Active and passive methods. Leading Edge (Tulsa, OK), 26(1). View Article
[5] Foti, S., Lai, C., Rix, G. J., & Strobbia, C. (2014). Overview of surface wave methods. In Surface Wave Methods for Near-Surface Site Characterization. View Article
[6] Anderson, N., Thitimakorn, T., Hoffman, D., Stephenson, R., & Luna, R. (2007). A Comparison of Four Geophysical Methods for Determining the Shear Wave Velocity of Soils. View Article
[7] Kyrkou, K., Frost, M., Fleming, P., Sartain, N. & Trinder, S. (2022). Seismic Surface Waves Methods for High-Speed Rail Earthworks Compliance: A Review of Measurement Practice, Proceedings of the 7thWorld Congress on Civil, Structural,and Environmental Engineering (CSEE'22). View Article
[8] Xia, J., Miller, R. D., Park, C. B., Hunter, J. A., Harris, J. B., & Ivanov, J. (2002). Comparing shear-wave velocity profiles inverted from multichannel surface wave with borehole measurements. Soil Dynamics and Earthquake Engineering, 22(3). View Article
[9] Dietrich, P., Kretschmer, F., Vienken, T., & Popp, S. (2009). Combination of different seismic methods and geotechnical sounding for a rapid characterization of the near-surface ground. EGU General Assembly Conference Abstracts, 11.
[10] Garofalo, F., Foti, S., Hollender, F., Bard, P. Y., Cornou, C., Cox, B. R., Dechamp, A., Ohrnberger, M., Perron, V., Sicilia, D., Teague, D., & Vergniault, C. (2016). InterPACIFIC project: Comparison of invasive and non-invasive methods for seismic site characterization. Part II: Inter-comparison between surface-wave and borehole methods. Soil Dynamics and Earthquake Engineering, 82. View Article
[11] Bodet, L., Pasquet, S., Dhemaied, A., Boisson-Gaboriau, J., Cui, Y. J., Leroux, P., Nebieridze, S., Tang, A. M., Terpereau, J. M., & Vitale, Q. (2015). Seismic surface-wave analysis for railway platform auscultation. Near Surface Geoscience 2015 - 21st European Meeting of Environmental and Engineering Geophysics. View Article
[12] Donohue, S., Gavin, K., & Tolooiyan, A. (2011). Geophysical and geotechnical assessment of a railway embankment failure. Near Surface Geophysics, 9(1). View Article
[13] Gunn, D. A., Donohue, S., Dashwood, B. A. J., Bergamo, P., Raines, M. G., Uhlemann, S., & Chambers, J. E. (2015). Earthworks ground model development using surface wave surveys. Geotechnical Engineering for Infrastructure and Development - Proceedings of the XVI European Conference on Soil Mechanics and Geotechnical Engineering, ECSMGE 2015, 6.
[14] Collis, J., & Hussey, R. (2013). Business Research A Practical Guide for Undergraduate and Postgraduate Students 3rd edition. In palgrave (Vol. 142).